Getting Started¶
Goal of this tutorial:
- Understand PARL’s abstraction at a high level
- Be familiar with the modules that need to be used in the process of constructing the agent
This tutorial will use the code from example to explain any solution to the classic Cartpole problem by constructing an agent through PARL.
Introduction to CartPole Problem¶
CartPole is also called an inverted pendulum. A pole is placed on a car, and the pole will fall due to gravity. In order to prevent the pole from falling down, we have to move the car to keep it upright. As shown below. At each time step, the input of the model is a 4-dimensional vector that represents the current state of the car and the rod, and the signal output by the model is used to control the car to move to the left or right. When the pole is not down, the environment will give 1 reward point for each time step; when the pole is down, the environment will not give any reward point, and the game is over.
Model¶
Model defines Forward Network, it is usually a Policy Network or a Value Function Network. The current environment status (State) is the input to the Network.
First, let’s build a Model that is a Forward Neural Network with two fully connected layers.
import paddle
import paddle.nn as nn
import paddle.nn.functional as F
import parl
class CartpoleModel(parl.Model):
def __init__(self, obs_dim, act_dim):
super(CartpoleModel, self).__init__()
hid1_size = act_dim * 10
self.fc1 = nn.Linear(obs_dim, hid1_size)
self.fc2 = nn.Linear(hid1_size, act_dim)
def forward(self, x):
out = paddle.tanh(self.fc1(x))
prob = F.softmax(self.fc2(out), axis=-1)
return prob
There are three major steps defining a Forward Network:
- Inherit
parl.Modelclass - Initialize layers in
__init__function - Build the Neural Network in
forwardfunction
In the above example code, we first initialize two nn.Linear layers and activation layers in __init__ function, then we define the computation in forward function: for an input observation, it first goes through a fully connected
layer followed by a tanh activation function, then the output of previous computation goes through another full connected layer followed by a softmax activation function. Finally we get the probability for each action.
Algorithm¶
Algorithm will update the parameters of the Model passed to it. In general, we define the loss function in Algorithm.
In this tutorial, we solve the benchmark Cartpole using the Policy Graident algorithm, which has been implemented in our repository.
Thus, we can simply use this algorithm by importing it from parl.algorithms.
model = CartpoleModel(act_dim=2)
algorithm = parl.algorithms.PolicyGradient(model, lr=1e-3)
After initialize the Model, we pass the instance to the Algorithm.
Agent¶
Agent is used to interact with the environment to generate training data. The training data is then passed to Algorithm to update the parameters of Model.
We need to inherit parl.Agent class to define our customized Agent. We first demonstrate the code, then walk through step by step.
class CartpoleAgent(parl.Agent):
def __init__(self, algorithm):
super(CartpoleAgent, self).__init__(algorithm)
def sample(self, obs):
obs = paddle.to_tensor(obs, dtype='float32')
prob = self.alg.predict(obs)
prob = prob.numpy()
act = np.random.choice(len(prob), 1, p=prob)[0]
return act
def predict(self, obs):
obs = paddle.to_tensor(obs, dtype='float32')
prob = self.alg.predict(obs)
act = int(prob.argmax())
return act
def learn(self, obs, act, reward):
act = np.expand_dims(act, axis=-1)
reward = np.expand_dims(reward, axis=-1)
obs = paddle.to_tensor(obs, dtype='float32')
act = paddle.to_tensor(act, dtype='int32')
reward = paddle.to_tensor(reward, dtype='float32')
loss = self.alg.learn(obs, act, reward)
return float(loss)
In general, users have to implement the following functions:
__init__function: the input is previously definedAlgorithm. Note that we need to callsuper(CartpoleAgent, self).__init__(algorithm).predictfunction: return a predicted action based on current observation, this function is often used for evaluation and deployment of theAgent.samplefunction: return a sampled action based on current observation, this function is often used in training to help theAgentexplore the observation space.
Start Training¶
First, let’s build a Cartpole Agent. As the code shown below, we first initialize the Model, then the Algorithm, finally the Agent.
model = CartpoleModel(obs_dim=obs_dim, act_dim=act_dim)
alg = parl.algorithms.PolicyGradient(model, lr=LEARNING_RATE)
agent = CartpoleAgent(alg)
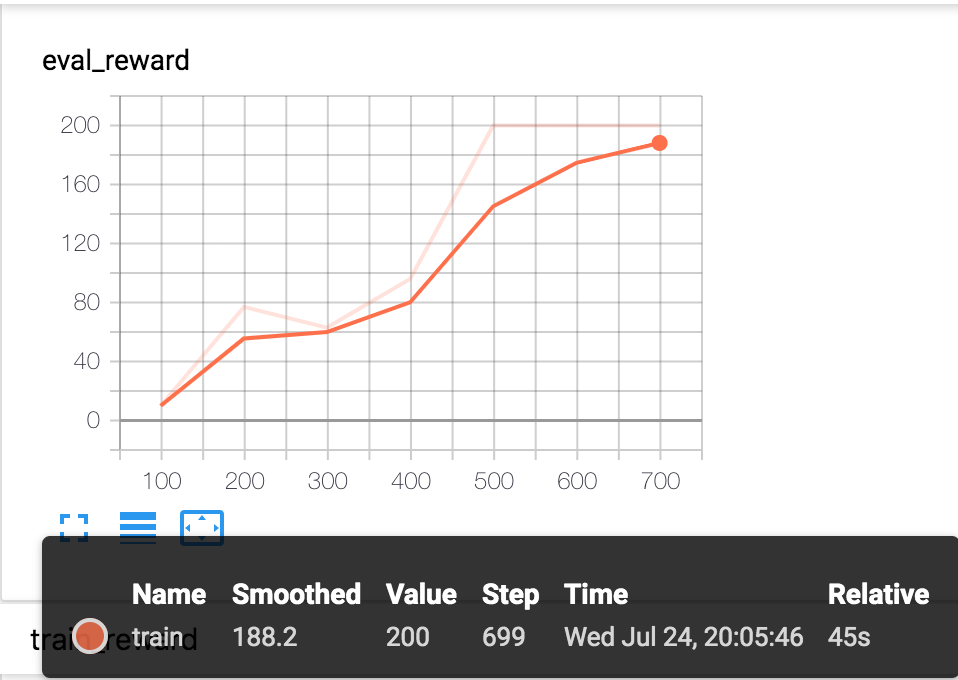
Then we use this agent to interact with the environment, and run around 1000 episodes for training, after which this agent can solve the problem.
def run_train_episode(env, agent):
obs_list, action_list, reward_list = [], [], []
obs = env.reset()
while True:
obs_list.append(obs)
action = agent.sample(obs)
action_list.append(action)
obs, reward, done, info = env.step(action)
reward_list.append(reward)
if done:
break
return obs_list, action_list, reward_list
env = gym.make("CartPole-v0")
for i in range(1000):
obs_list, action_list, reward_list = run_train_episode(env, agent)
if i % 10 == 0:
logger.info("Episode {}, Reward Sum {}.".format(i, sum(reward_list)))
batch_obs = np.array(obs_list)
batch_action = np.array(action_list)
batch_reward = calc_reward_to_go(reward_list)
agent.learn(batch_obs, batch_action, batch_reward)
if (i + 1) % 100 == 0:
_, _, reward_list = run_episode(env, agent, train_or_test='test')
total_reward = np.sum(reward_list)
logger.info('Test reward: {}'.format(total_reward))
Summary¶
In this tutorial, we have shown how to build an Agent step-by-step to solve the Cartpole problem.
The whole training code could be found here. Have a try quickly by running several commands:
# Install dependencies
pip install paddlepaddle
pip install gym
git clone https://github.com/PaddlePaddle/PARL.git
cd PARL
pip install .
# Train model
cd examples/QuickStart/
python train.py